We provide sets of relative relations needed to compute our metric
for an extensive set of datasets frequently used in the robotics
community. The relations have been obtained by manually matching
laser-range observations to avoid the errors caused by matching
algorithms.
We gratefully thank all the people that have made their datasets publicly available on Radish: The Robotics Data Set Repository. These datasets are available under the Creative Commons Attribution License.
In addition to the indoor datasets, we provide an outdoor dataset. The outdoor dataset and the manually obtained relations for all the datasets are available under the Creative Commons Attribution License.
We gratefully thank all the people that have made their datasets publicly available on Radish: The Robotics Data Set Repository. These datasets are available under the Creative Commons Attribution License.
In addition to the indoor datasets, we provide an outdoor dataset. The outdoor dataset and the manually obtained relations for all the datasets are available under the Creative Commons Attribution License.
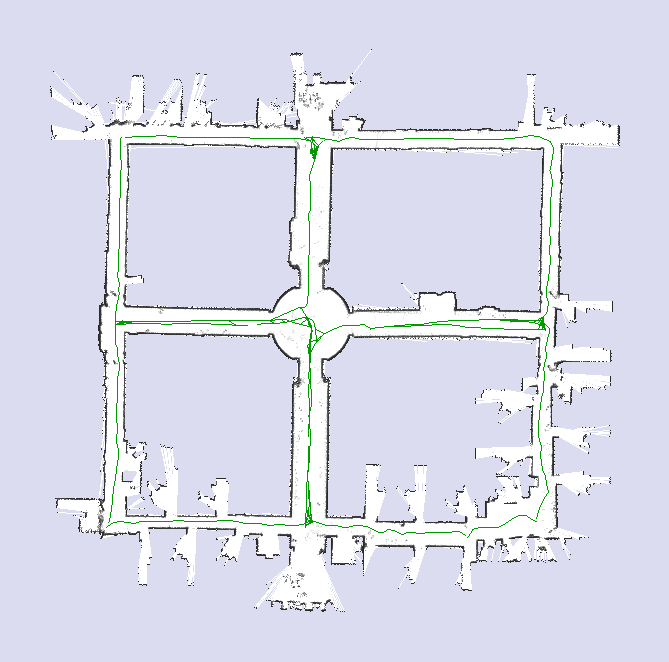
Dataset: ACES Building (Austin)
|
The raw log data was provided by Patrick Beeson. |
|
download log file download relations |
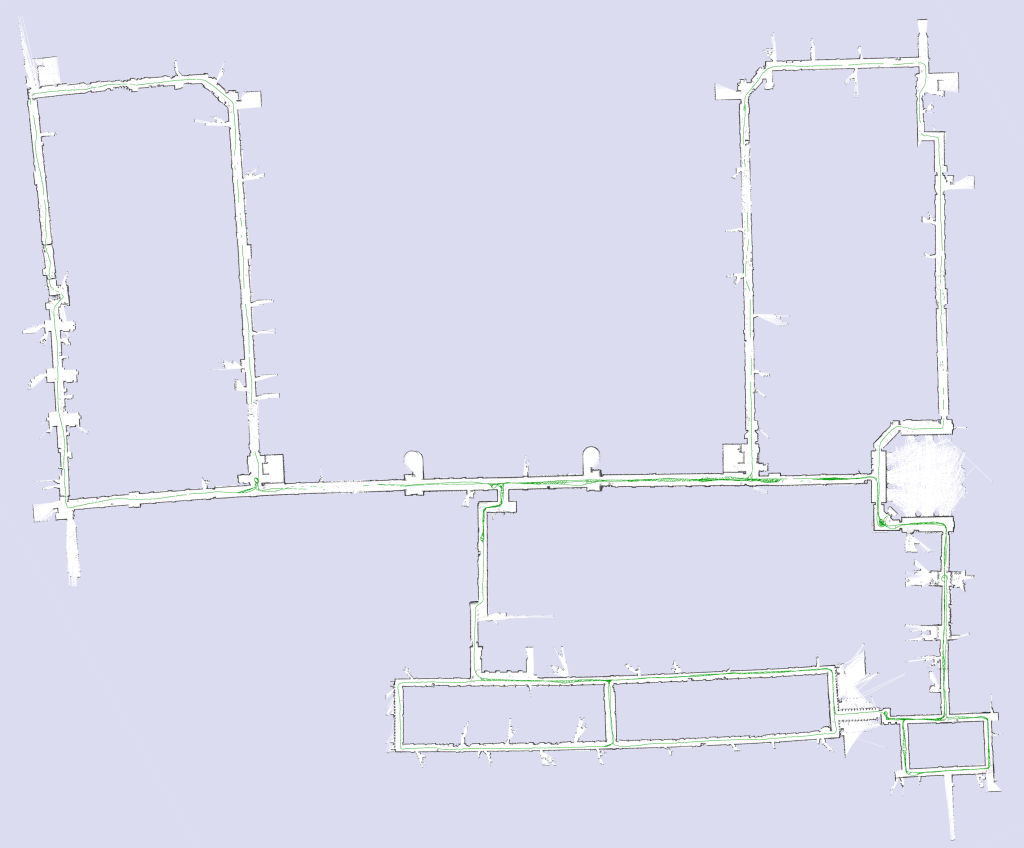
Dataset: Intel Research Lab (Seattle)

|
The raw log data was provided by Dirk Hähnel. |
|
download log file download relations |
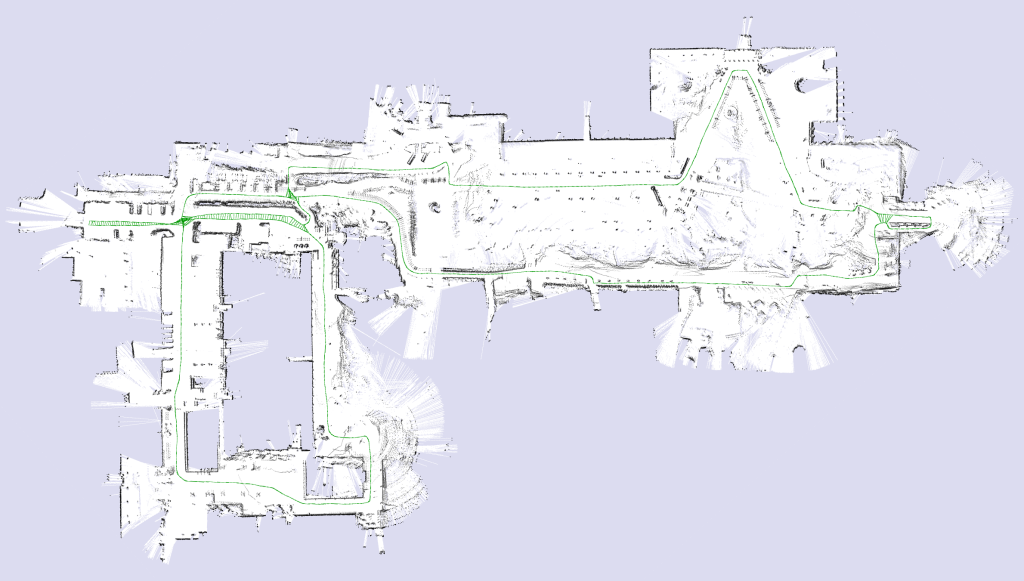
Dataset: 2 MIT Killian Court (2D)
|
The raw log data was provided by Mike Bosse and John Leonard. |
| download log file downlaod relations Google Maps view of the environment |
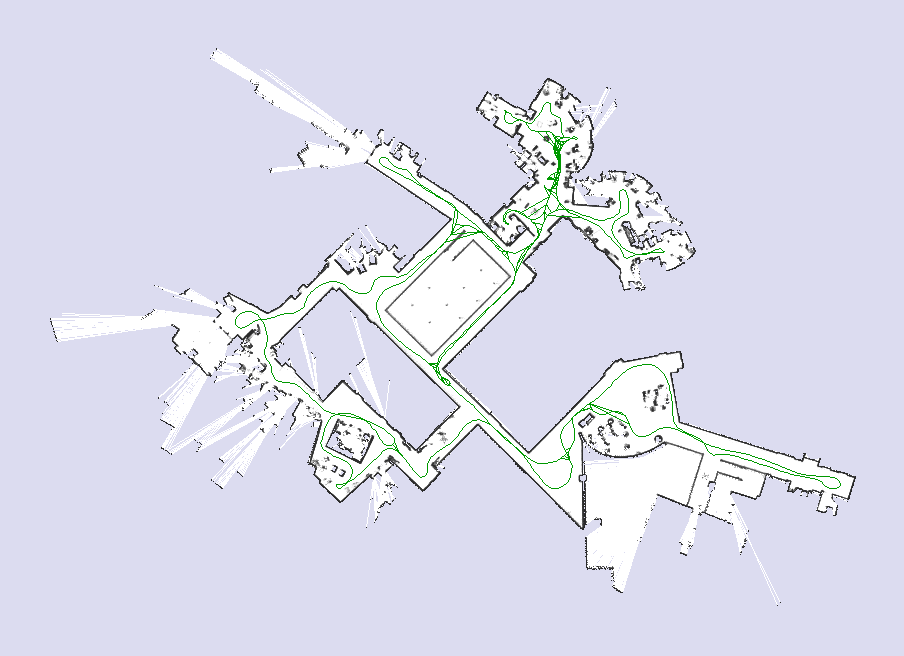
Dataset: MIT CSAIL Building
|
The raw log data was provided by Cyrill Stachniss. |
| download log file download relations |
Dataset: Freiburg Indoor Building 079

|
The raw log data was provided by Cyrill Stachniss. |
| download log file download relations |
Dataset: Freiburg University Hospital (3D)
|
The raw log data was provided by Bastian Steder, Rainer Kümmerle, Christian Dornhege, Michael Ruhnke,
Cyrill Stachniss, Giorgio Grisetti, and Alexander Kleiner. The complete logfile contains all the raw data recorded on a PowerBot platform.
|
|
download log file download complete log file download relations download global relations Google Maps view of the environment |