
Projects - MVNMapping
Mapping Indoor Environments Based on Human Activity |
||
| We present a novel approach to build approximate maps of structured environments utilizing human motion and activity. Our approach uses data recorded with a data suit which is equipped with several IMUs to detect movements of a person and door opening and closing events. In our approach we interpret the movements as motion constraints and door handling events as landmark detections in a graph-based SLAM framework. As we cannot distinguish between individual doors, we employ a multi-hypothesis approach on top of the SLAM system to deal with the high data-association uncertainty. As a result, our approach is able to accurately and robustly recover the trajectory of the person. We additionally take advantage of the fact that people traverse free space and that doors separate rooms to recover the geometric structure of the environment after the graph optimization. We evaluate our approach in several experiments carried out with different users and in environments of different types. |
 | |
|
Related documents: PhdThesis: Mapping, State Estimation, and Navigation for Quadrotors and Human-Worn Sensor Systems TRO Journal paper (2012): Activity-based Estimation of Human Trajectories ICRA 10: Mapping Indoor Environments Based on Human Activity see also www.slawomir.de ICRA 15 (to appear): 3D Reconstruction of Indoor Environments From Human Activity |
||
Videosgreen: doorsgray: trajectory red: current pose blue circles: uncertainty of the doors w.r.t. the current pose All videos display the same information in two ways. On the left you see the full trajectory whereas on the right only the current trajectory is shown. In both cases only incremental updates are performed. The full trajectory is shown for better comparison only. For better visibility, the uncertainty circles are not drawn in the movie shown right. |
||
|
Experiment #1: length of trajectory about 1.6km |
||
|
Experiment #2: length of trajectory about 1.3km |
||
|
Experiment #3: |
||
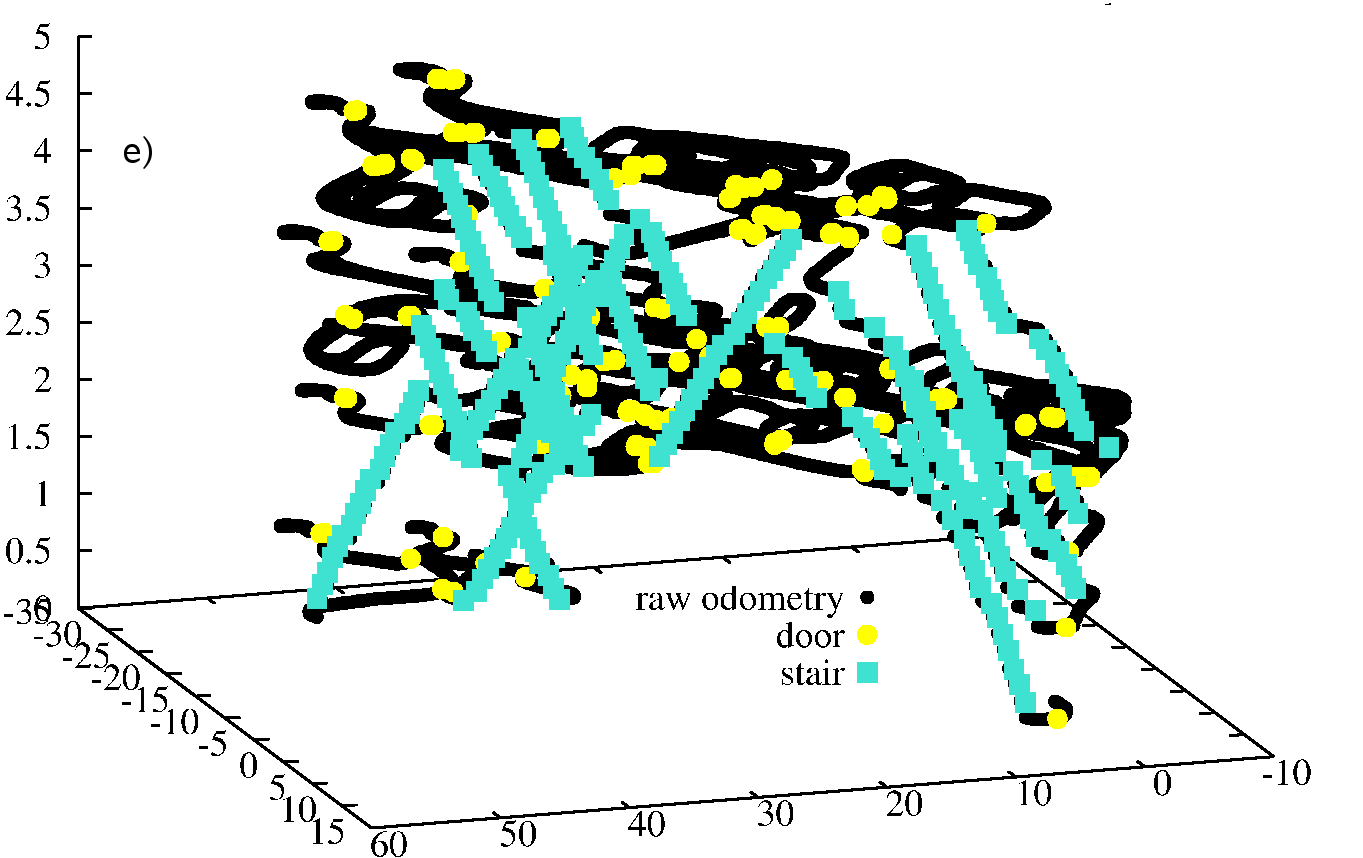
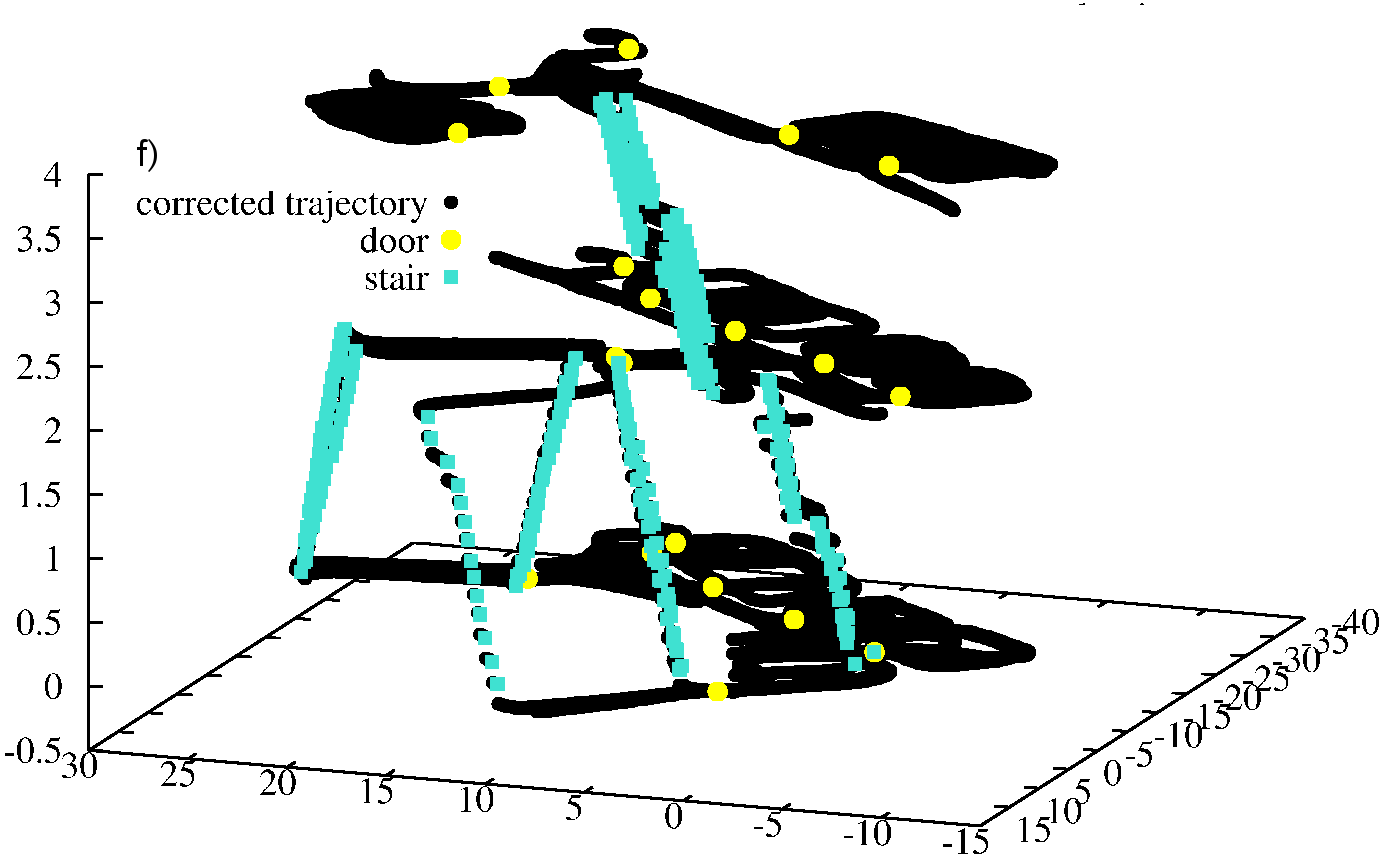
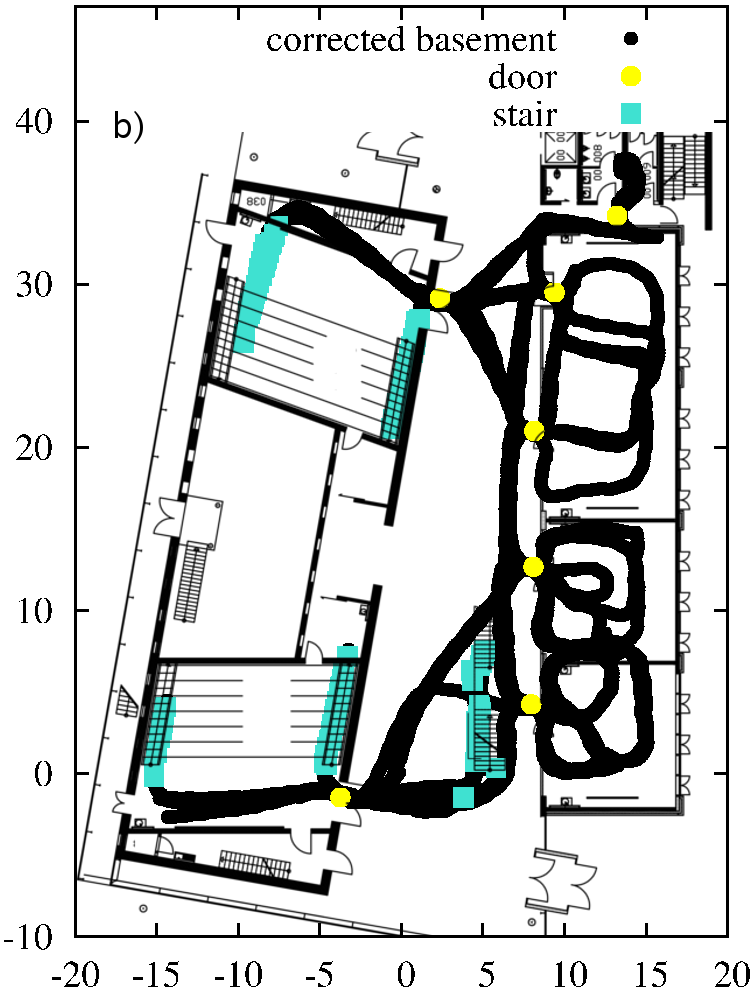
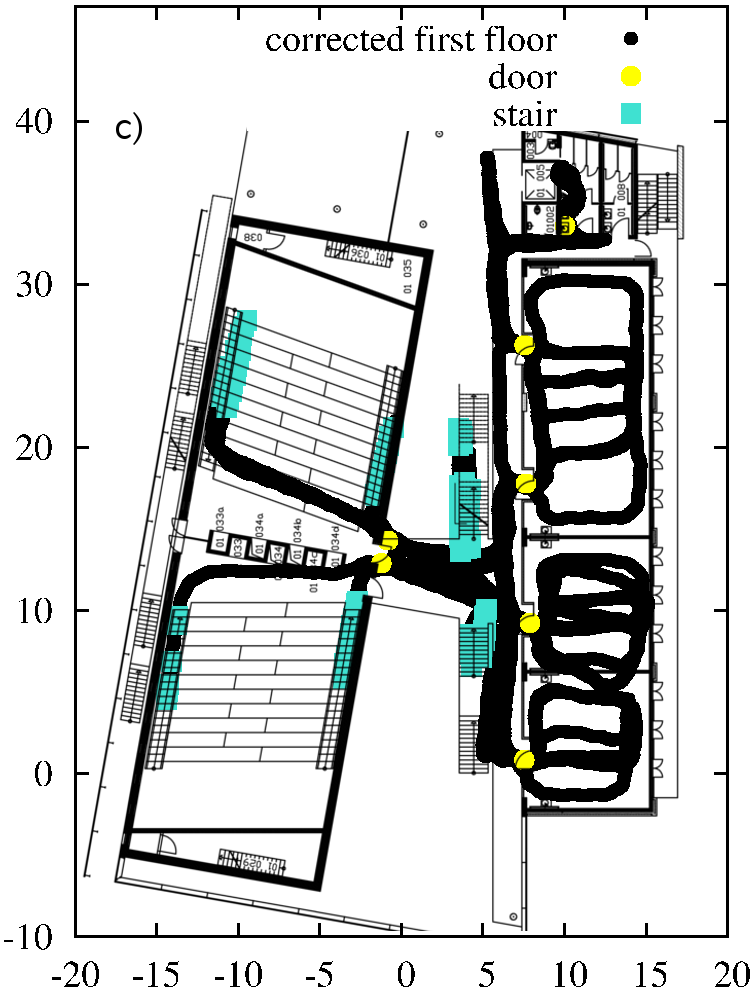
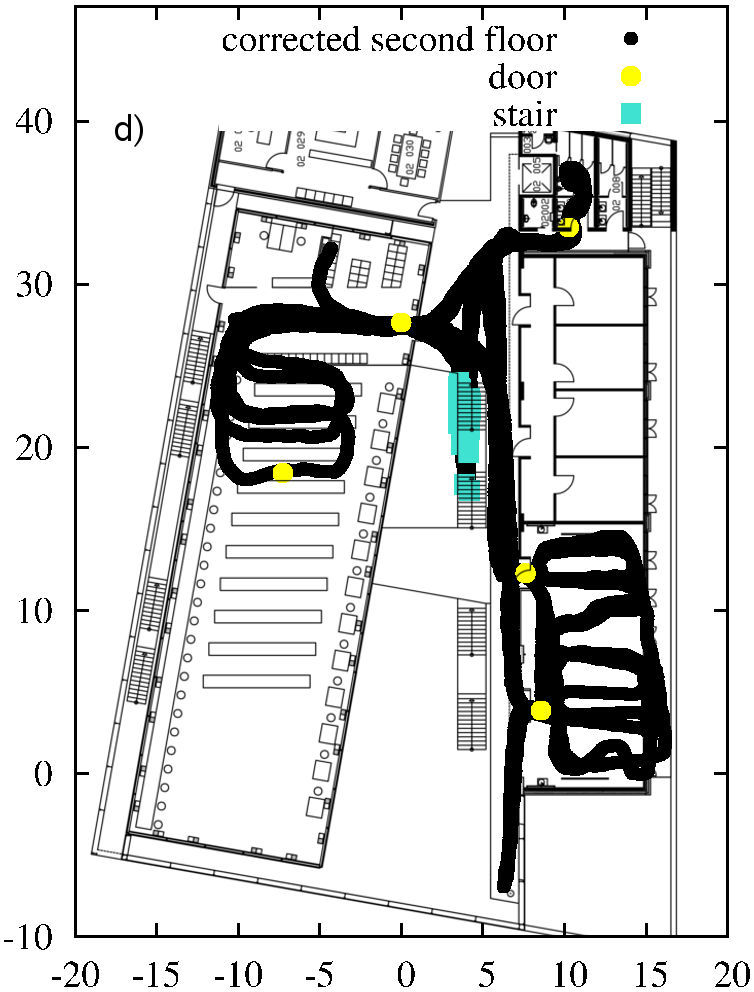
Extension towards 3D reconstructionRecently, we successfully extended our approach towards 3D reconstruction by including the activity of walking up/down a staircase. The next image shows one of our experiments. It contains a trajectory of approximately 2.2km covering 3 floors.The first image displays the raw information given the raw data from the Data Suit and the raw data from detecting doors and stairs. The second image shows the result of our 3D reconstruction approach. The remaining images show an overlay of the trajectory over the floorplan of the same building. Videos of different runs including 3D reconstruction can be found below. |
||
|
||
|
||
|
Experiment #4: length of trajectory about 2.2km |
||
|
Experiment #5: length of trajectory about 2.85km |
||
|
Experiment #6: length of trajectory about 1.46km |
||
3D Reconstruction of Indoor Environments from Human ActivityRecently, we extended the system to reconstruct 3D models of indoor environments from human motion. These models contain several objects that are relevant to humans such as chairs, tables, and walls. The size and position of walls, tables, etc. is inferred from the human motion, for the walls, we additionally perform collision checks. Furthermore, we consider the activities and objects as landmark observations in a graph-based formulation of the simultaneous localization and mapping problem. This allows us to include loop-closure constraints whenever the user revisits an already reconstructed object using a nearest-neighbor data association. Whenever a loop is closed, we perform a least-squares optimization of the graph to correct for accumulated errors and to obtain a globally optimal solution. |
||
|
In an experiment, we illustrate the 3D reconstruction of an environment with several chairs, walls, tables and screens. The model is constructed incrementally. Whenever the user revisits an object and the system detects a loop-closure, we perform an optimization of the graph containing the trajectory of the user and the positions of objects in the model. The model construction is illustrated in the following video: |
||
|
More information can be found in the paper:
|
||