
Projects - Quadrotor
A Fully Autonomous Indoor Quadrotor |
|
| Recently there has been an increased interest
in the development of autonomous flying vehicles. Whereas most of
the proposed approaches are suitable for outdoor operation, only a
few techniques have been designed for indoor environments, where the
systems cannot rely on GPS and therefore have to use their
exteroceptive sensors for navigation. Here, we present videos
demonstrating our general navigation system which enables a
small-sized quadrotor systems to autonomously operate in indoor
environments. To achieve this, we systematically extend and adapting
techniques which have been successfully applied on ground robots.
Related documents: PhdThesis: Mapping, State Estimation, and Navigation for Quadrotors and Human-Worn Sensor Systems TRO Journal paper (2012): A Fully Autonomous Indoor Quadrotor RSS WS Paper (2011): 3D Place Recognition and Object Detection using a Small-Sized Quadrotor ICRA 09: Towards a Navigation System for Autonomous Indoor Flying see also www.slawomir.de | |
Videos |
|
|
Localization in a known map If the video does not play, download it here 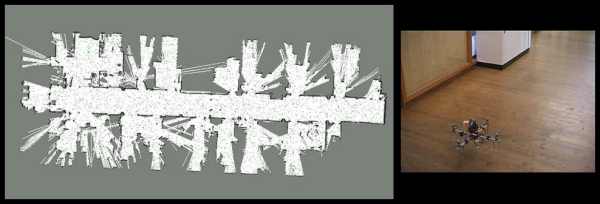
|
|
|
SLAM and first autonomous hovering and waypoint following tests: If the video does not play, download it here 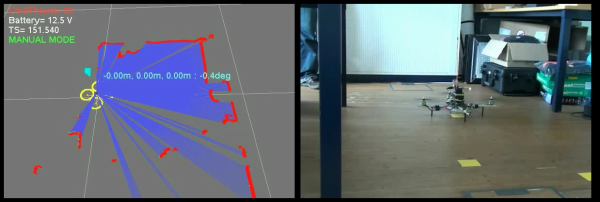
|
|
|
Autonomous Flight and Map building (SLAM) in our corridor: If the video does not play, download it here 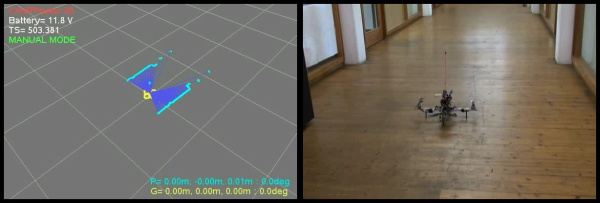
|
|
|
Our Multi-Level mapping: If the video does not play, download it here 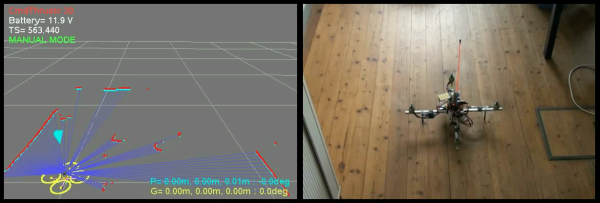
|
|
|
Improved path plannig and dynamic obstacle avoidance: If the video does not play, download it here 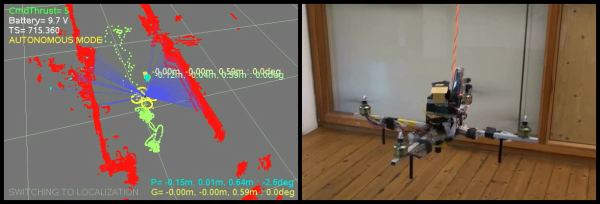
|
|
|
Our quadrotor equipped with a fuel-cell prototype from TU-Berlin: If the video does not play, download it here 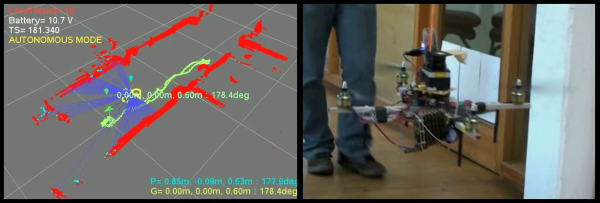
|
|