
Robot Mapping - WS 2019/20
Robot Mapping
What is this lecture about?
The problem of learning maps is an important problem in mobile robotics. Models of the environment are needed for a series of applications such as transportation, cleaning, rescue, and various other service robotic tasks. Learning maps requires solutions to two tasks, mapping and localization. Mapping is the problem of integrating the information gathered with the robot's sensors into a given representation. It can intuitively be described by the question "What does the world look like?" Central aspects in mapping are the representation of the environment and the interpretation of sensor data. In contrast to this, localization is the problem of estimating the pose of the robot relative to a map. In other words, the robot has to answer the question "Where am I?" These two tasks cannot be solved independently of each other. Solving both problems jointly is often referred to as the simultaneous localization and mapping (SLAM) problem. There are several variants of the SLAM problem including passive and active approaches, topological and metric SLAM, feature-based vs. volumetric approaches, and may others.
The lecture will cover different topics and techniques in the context of environment modeling with mobile robots. We will cover techniques such as SLAM with the family of Kalman filters, information filters, and particle filters. We will furthermore investigate graph-based approaches, least-squares error minimization, techniques for place recognition and appearance-based mapping, and data association. The exercises and homework assignments will also cover practical hands-on experience with mapping techniques, as basic implementations will be part of the homework assignments.
Organization
- Organizers: Prof. Dr. Wolfram Burgard Dr. Daniel Büscher, Lukas Luft
- Tutors: Shengchao Yan
- Teaching is done in English.
- This is an online lecture. That means students are responsible for studying the contents of the lecture and working on the assignments in a self-organized manner. Every week, the assignments are discussed during the exercise session.
- Exercise sessions
- Date: on Tuesdays, 14:15 to 15:30, starting on November 5
- Location: building 051, Seminar 00-034
- Exam
- Type: oral
- Dates: individual dates in March, see HisInOne
- Location: building 080, Seminar 01.011
- Technical test sessions: February 28, 11:00 and March 2, 11:00
- Join this QnA google forum for questions about this lecture. You should be signed in with your google account and "Apply for membership" of this group.
- Recordings, slides, homework assignments, and additional material is available on this website.
- The lecture is part of the area Cognitive Technical Systems in the CS master program.
- Teaching material and exercises are based on the previous course taught by Prof. Dr. Cyrill Stachniss.
Schedule
In case you need to revisit material about Gaussians or a reference for matrix operations:
- Basic probability rules, pdf
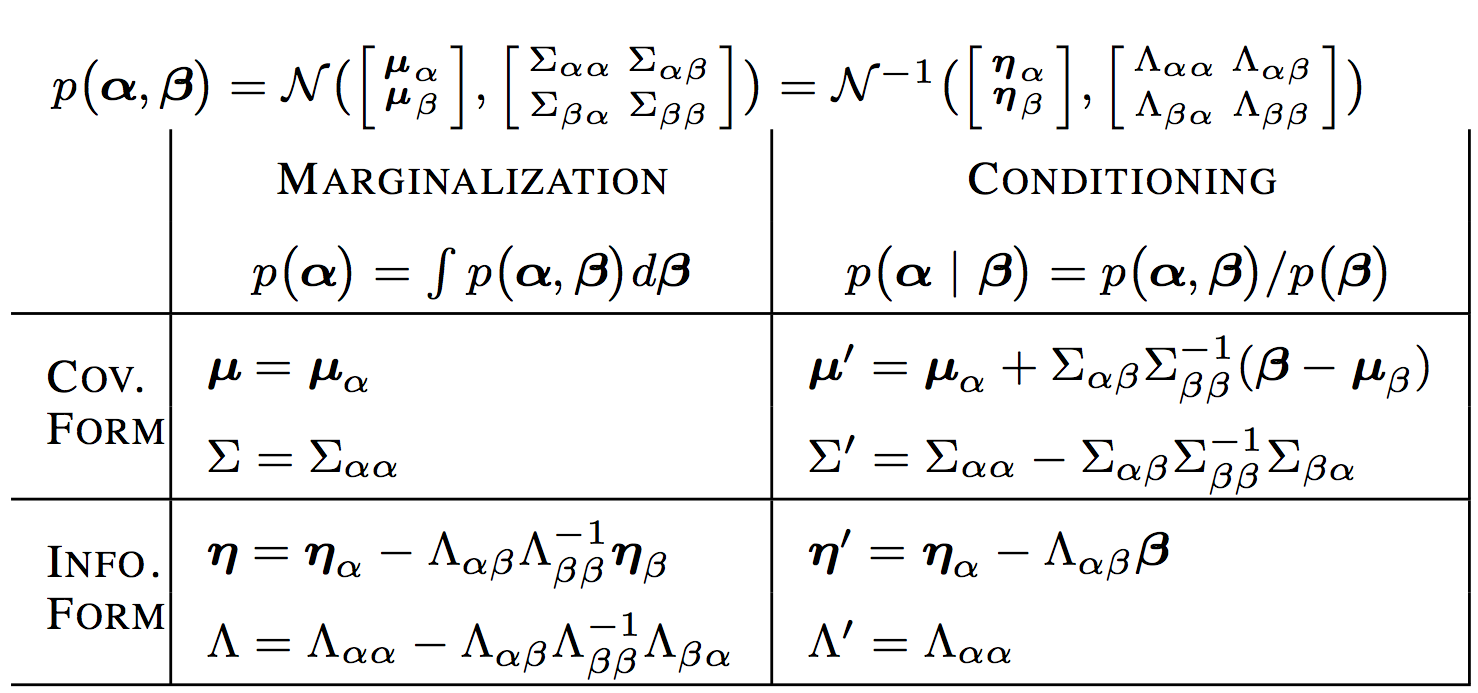
- Marginalization and Conditioning of Gaussians (taken from Eustice et al, IROS 05), png
- K. Murphy: Gaussian, pdf
- Petersen and Pedersen: The Matrix Cookbook, pdf
{kind=link}
Relevant Literature for the Course
Most of the literature is available as PDF files for free, but not the "Probabilistic Robotics" book. You find it in the TF library.- Thrun, Burgard, Fox: Probabilistic Robotics, MIT Press, 2005, website
- Springer Handbook on Robotics, Chapter on Simultaneous Localization and Mapping (Chapt. 37 in 1st edition)
- Schoen and Lindsten: Manipulating the Multivariate Gaussian Density, 2011, pdf
- Gian Diego Tipaldi: Notes on Univariate Gaussian Distributions and One-Dimensional Kalman Filters, 2015, pdf
- Welch and Bishop: Kalman Filter Tutorial, 2011, pdf
- Julier and Uhlmann: A New Extension of the Kalman Filter to Nonlinear Systems, 1995, pdf
- Thrun, Liu, Koller, Ng, Ghahramani, Durrant-Whyte: Simultaneous Localization and Mapping With Sparse Extended Information Filters, 2004. pdf
- Eustice, Walter, Leonard: Sparse Extended Information Filters: Insights into Sparsification, IROS, 2005. pdf
- Montemerlo, Thrun, Kollar, Wegbreit: FastSLAM: A Factored Solution to the Simultaneous Localization and Mapping Problem, 2002, pdf
- Montemerlo, Thrun: Simultaneous Localization and Mapping with Unknown Data Association Using FastSLAM, 2003, pdf
- Grisetti, Stachniss, Burgard: Improved Techniques for Grid Mapping with Rao-Blackwellized Particle Filters, 2007, pdf
- Stachniss, Grisetti, Burgard, Roy: Analyzing Gaussian Proposal Distributions for Mapping with Rao-Blackwellized Particle Filters, 2007, pdf
- Madsen, Nielsen, Tingleff: Methods for Non-Linear Least Squares Problems, 2004, pdf
- Grisetti, Kuemmerle, Stachniss, Burgard: A Tutorial on Graph-Based SLAM, 2010, pdf
- Grisetti, Kuemmerle, Stachniss, Frese, Hertzberg: Hierarchical Optimization on Manifolds for Online 2D and 3D Mapping, 2010, pdf
- Olson, Agarwal: Inference on Networks of Mixtures for Robust Robot Mapping, 2013, pdf
- Agarwal, Tipaldi, Spinello, Stachniss, Burgard: Robust Map Optimization Using Dynamic Covariance Scaling, 2013, pdf
- Olson, Leonard, Teller: Fast Iterative Optimization of Pose Graphs with Poor Initial Estimates, 2006, pdf
- Grisetti, Stachniss, Burgard: Non-linear Constraint Network Optimization for Efficient Map Learning, 2009, pdf
- Olson: Recognizing Places using Spectrally Clustered Local Matches, 2009, pdf
- Tipaldi, Arras: FLIRT -- Interest Regions for 2D Range Data, 2010, pdf